
Elektronik sistemler ile fiziksel dünya haraket biçiminde etkileşime girmesi gerektiği zaman motor dediğimiz elektrik enerjisini hareket enerjisine çeviren aletlere ihtiyaç vardır. Hele ki hareketi kesin olarak kontrol etmesi gerektiğinde, geri beslemeli sistemler haricinde kullanılacak tek alet adım motorlar kalmaktadır.
Bu projede Atmega 8 ile tek kutuplu Adım motorların sürülmesi konusu anlatılacaktır.

Günümüzde adım motorlar bilgisayar dahil (Fan, sabit diskler, CD sürücüleri, DVD sürücüleri, hatta yazıcılar gibi) birçok alanda rahatlıkla kullanım alanı bulmuştur. Elektronik sistemlerin gelişmesi sayesinde özellikle konum bilgisi konusunda geri besleme gerekmemesi açısından adım motorlar oldukça kullanışlıdır.

Aslında doğrudan projede anlatılacak olan adım motor HP (firmasının kendi ticari markasıdır) mürekkep püskürtmeli yazıcıların 600 serisi olarak tanımlanan yazıcılarda kağıt sürme ve bazılarında kafa park için kullanılan motorlar kullanılarak proje gerçekleştirilmiştir. Aynı tipte olan herhangi bir adım motorda kullanılabilir. Hatta piyasada satılan 6 veya 8 kablo olarak tanımlanan adım motorlarda rahatlıkla kullanılabilmektedir. Yeterki bağlantıları doğru yapılsın.

Öncelikle adım motorunun 5 adet bağlantı ucu var. Bobin olarak düşünüldüğünde motor içinde 4 tane bobin var. Bu bobinlerin bir uçları 4 motor bağlantı ucunu oluşturuyor. Bobinlerin diğer uçları birleştirilerek motorun beşinci ucunu oluşturuyor.
Motor özellik olarak aslında ilginçtir rotoru sürekli mıknatıstır. Yani adım motorlarda hareket eden sürekli mıknatıstır. Bobinler ise stator konumunda sabittir. Burada hareketi sağlayan bobinler üzerindeki akımın zamana bağlı olarak belirli bir düzen içinde birbiri ardına takip ederek değişmesidir.


En azından mıknatıslardan aynı kutupların birbirini ittiğini ve zıt kutupların birbirini çektiğini biliyoruz. Motorun rotoru üzerinde birbirin takip eden düzende mıknatıslar. Aynı şekilde statoru üzerinde her biri birbirine göre biraz farklı düzende yerleştirilmiş 4 elektromıknatıs var.(bobinler) Bir elektromıknatısın yerleşimi rotor üzerindeki mıknatısların yerleşim düzeniyle aynı şekilde yapılmış. Bu nedenle bir elektromıknatıs etkinleştirildiğinde rotoru belirli bir konumda kalmaya zorluyor. (Aslında bu aynı zamanda motorun belirli bir konumda kilitlenmesine olanak tanır) Böylece 4 bobin (uygun sırada) birbiri ardına etkinleştirildiğinde rotor dönme hareketini oluşturuyor.


Buradaki proje aslında temel şeması ve prensipleri verilmiş bir olayın işlemci ile gerçekleştirilmesinden ibarettir. Biraz abartı olabilir çok fazla şey beklenmezse, sistem 4017 ve birkaç sürücü transistör ile bile gerçekleştirilebilir.
Motorun ortak ucu işlemciden daha yüksek bir +V gerilimle beslenir.(bu projede 9V). Her bir bobin kontrol ucunu onu etkinleştirmek için toprağa çekilmesi yeterlidir. Toprağa çekme işlemi basit bir anahtarlama hareketidir ki bu bir uygun güçlü trasistör ile yaplıması mümkündür.

İşlemci anahtarlama için kullanılan sürücü transistörleri kontrol ettiğinde işlemcinin programı ve gelen motor hız kontrol ucuna göre motor kontrollu bir şekilde dönme hareketini oluşturacaktır.
Not: Burada anlatılandan farklı yapıda ve çalışma şeklinde olan adım motorları adı altında toplanmış motorlarda vardır.
Projede motor tek yönde dönecek şekilde yazılımı hazırlanmıştır.
Devre basitçe 2 giriş ucu var. Birisi izin ucu ki bu motorun dönme hareketi yapması için gereken izni verir (lojik1 seviyesinde). İkinci uç ise saat ucu denilebilen motorun dönme hızını belirleyen uçtur. Yani bu ucu bir sinyal geldiğinde motor bir adım açısı kadar döner.
Not: Adım motorlarda adım açısı motora özel bir paremetredir. Basitçe birbirini takip eden iki bobin etkinleştirilmesinde motorun yapabildiği konum değişikliğidir. Ne kadar küçükse motorun konumlama hassasiyeti o kadar yüksek olduğu anlamını taşır. (rotor ve stator üzerindeki mıknatısların dizilme sıklığı denebilir.)
Devre için kontrol izni ucu lojik1 seviyesinde olduğunda sistem çalışır. (kablonun boşta kalma durumu) İkinci şart ise motor hız tetikleme saati. Burada motorun her dönme adımı için bir saat darbesi gelmesini bekler. Böylece motorun dönme hızı saatin sinyali hızı ile orantılı olacaktır. Burada motor bir sistem üzerinde kullanılmadığından motoru sürmek için gereken saat sinyali bir sinyal jeneratöründen sağlanmıştır.
Not:Bu motoru sürmek için kullanılan sürme saat sinyalinde bir sınırlama olduğunu belirtmek gerekiyor. Bu bobinlerin tepki süresi ile ilgili bir konu. Daha yüksek hızlarda sürmek için bazı özel sürme tekniklerini kullanmak gerekiyor.

Devredeki her şey M1 olarak tanımlanan adım motoru sürmek için kullanılmaktadır.Minimum 5 telli olarak tanımlanan bağlantı bulunan motorlarda kullanılabildiği gibi 6 ve 8 telli motorlarda bağlantılar düzenlenerek kullanılabilmektedir.
Sistemin kalbini IC1 Atmega8 işlemcisi oluşturuyor. Bu işlemci için gereken saat sinyallerini XT1 (3,6864 MHz) ,C1,C2 (27pF) oluşturuyor. Bir motor bobini sürücüsü R1 (1K), R2 (10K),R3(1K),R4 (10K), Q1 (TIP122),Q2 (BC327) ve D1(1N4007) grubu ile tanımlanmaktadır. Aynı şekilde 4 grup ile 4 bobin sürücü grubu olduğu görülmektedir. R1,(R5,R9,R13) (1K) ile akım sınırlama direnci ile işlemci üzerinden Q2,(Q4,Q6,Q8) (BC327) transistorlerini sürer. R2,(R6,R10,R14)10K direnci bağlı olduğu transistörün baz noktasını besleme gerilimine çekmeye çalışır. R3, (R7,R11,R15) (1K) akım sınırlama direnci, Q1 (Q3,Q5,Q7) (TIP122) transistörlerini sürer. R4, (R8,R12,R16) (10K) direnci bağlı olduğu transistörün kollektör noktasını toprağa çekmeye çalışır. D1 (D2,D3,D4) diyodu anahtarlama olarak çalışan transistörün bobin üzerinde oluşturacağı ters gerilimden bağlı olduğu transistörü korur.
P1 üzerine R18 ve R19 dirençleri ile özellikle bağlı oldukları uçlar boşta kaldığı zaman çevreden parasit etkileri sönümlemek için kullanılır.
M1 motorun besleme hattı üzerinde bulunan R17 (0.22R/5W) direnci motor bobinleri üzerinde bir akım sınırlaması sağlayacaktır.
Geri kalan kondansatörler zaten filtre için kullanılıyor. P1 motor kontrol için bağlantı konnektörü, ISP işlemci için programlama konnektörüdür.


Not: Şemada iki tane besleme görülmektedir. Vcc olarak tanımlanan +5V besleme gerilimidir. Vmot olarak tanımlanan gerilim ise motoru sürmek için gereken gerilimdir. Vmot gerilimi motor için önerilen gerilime bağlı olarak değişmektedir.Vmot +12V ile +30V arasında kullanılabilmektedir. (farklı tipleri olabilir). Tek besleme kullanılacaksa Vmot ve Vcc arasına 7805 bağlanarak (toprak bacağı unutulmadan) sadece Vmot gerilimi ile devrenin çalışması mümkündür. Devre bir sistemin parçası olacaksa zaten Vmot ve Vcc gerilimleri ayrı ayrı üretilebilir.
Sadece farklı frekanslarda kristal kullanılırsa işlemci programının değiştirilmesi gerekir.
Tabii ki kristal topraklanmalıdır. Q1,Q3,Q5,Q7 transistörlerinin kollektörleri metal gövde ile bağlantılı olduğundan ortak bir soğutucu kullanılmamaktadır. Yalıtım malzemeleri ile uğraşmak isteyenler ortak bir soğutucu kullanabilir.



| 1K | R1,R3,R5,R7,R9,R11,R13,R15 |
| 10K | R2,R4,R6,R7,R10,R12,R14,R16,R18,R19 |
| 0.22R/5W | R17 |
| 10µF/25V | C5,C6 |
| 27pF | C1,C2 |
| 100nF | C3,C4 |
| 1N4007 | D1,D2,D3,D4 |
| Atmega8 | IC1 |
| TIP122 | Q1,Q3,Q5,Q7 |
| BC327 | Q2,Q4,Q6,Q8 |
| 3,6864Mhz kristal | XT1 |
| 6'li header | isp |
| soğutucu | 4 adet |
Burada işlemci için soket verilmemiştir. Kaliteli 20 bacaklı soket oluşabilecek problemlerin önüne geçecektir.
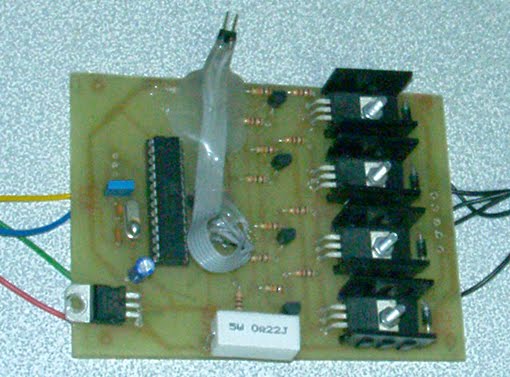
Şu an için devrenin bir kullanım alanı uygulaması gerçekleştirilmediğinden test için (en azından devrenin çalıştığıni göstermek açısından) basit düzenek oluşturuldu. Bu bir güç kaynağı ve darbe üretecinden oluşuyor. (İsteyen pek ala basit bir 555 entegreli devre oluşturabilir.) Test için Vcc ve Vmot için ayrı besleme gerilimleri ile uğraşmaktan kaçınmak için Vcc ve Vmot arasına bir 7805 entegresi eklenmiştir. (7805 entegresi resimler üzerinde de görülmektedir.)


PM55L-048
Burada doğrudan yazıcı üzerindeki motor bağlantı kablosu kullanıldığından konnektör üzerindeki kablo aynı sıra ile karta lehimlenirse aynen kullanılabilir.(sırasını atlamadan, motor ters dönerse bağlantı sırasını tersten başla). Tek yapılması gereken konnektörün motora takılması...

PM35L-048
Burada doğrudan yazıcı üzerindeki motor bağlantı kablosu kullanıldığından konnektör üzerindeki kablo aynı sıra ile karta lehimlenirse aynen kullanılabilir.(sırasını atlamadan, motor ters dönerse bağlantı sırasını tersten başla). Tek yapılması gereken konnektörün motora takılması...

PM20S-020
Bu motor tipinde kart üzerinden kablo bağlantıları sökülmeyecekse kablolar doğrudan karta lehimlenebilir. (Aslında kart üzerine klemens bağlantıları lehimlemek iyi fikir olabilir). Şekil 17'deki kart bağlantılar referans alınarak kablo bağlantıları;
| 1 | siyah |
| 2 | koyu gri |
| 3 | kırmızı, kırmızı |
| 4 | kahverengi |
| 5 | sarı |

SY60STH86
Bu biraz endüstriyel bir motor. Gerçi yüksek güçlü sistemleri sürmek üzere tasarlanmış ve 1.8 derecelik dönüş açısı var. Kablo bağlantıları düzenlenerek bu projede verilen kart ile sürülebilir. Şekil 17'deki kart bağlantılar referans alınarak kablo bağlantıları;
| 1 | yeşil |
| 2 | sarı |
| 3 | yeşil-beyaz, sarı-beyaz, siyah-beyaz, kırmızı-beyaz |
| 4 | siyah |
| 5 | kırmızı |

Ekler:
Atmega8 hakkında ayrıntılı bilgi için
"Atmega8 ile tek kutuplu Adım motorların sürülmesi" projesi için gereken dosyalar
Bu devrenin yapım sorumluluğu size aittir. Devre yapıldı ve çalışıyor. K.A....
Hiç yorum yok:
Yorum Gönder